Turtlebot3 の自作 #4
-- ESP32 Wi-Fi で、Phase1 完成 --
前回の Turtlebot3 の自作 #3 の途中から、ボードを、 ESP32 Wi-Fi に変えた記事の続きです。
注文した、STM32F103, 411 Black Pill が、なかなか届かないので、結局 ESP32 で作成を継続しました。
開発途中の問題点や対応方法は、前回の記事の 5. ESP32 Wi-FI に切り替えに記載してあるので、そちらを参考にしてください。
一連の記事は、こちら。
今回は、補足的に回路図、開発環境の記述になります。
開発環境
Ubuntu Mate 18.04
Visual Studio Code/ Platformio IDE
Framework: arduino
ROS: Melodic
ROS library: rosserial_arduino with Wi-Fi
Board: ESP32 DIP化キット
注) DIP化キットよりも、他の 開発ボードの方が、簡単で割り安かも!!
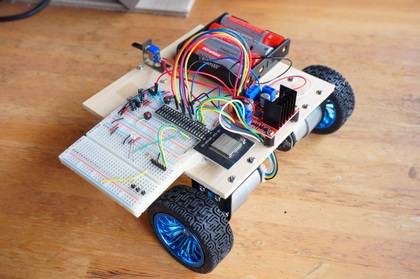
1. 写真。
続きを読む: Turtlebot3 の自作 #4