Turtlebot3 の自作 #7
-- シャシーの作り替え --
Depth Camera を載せるので、シャーシを2段にするのに当たって、
シャーシを作り替えることにしました。
タイヤの間隔は同じで、しかしペイロードはもうすこし広くなるようにシャーシを新たに採寸しまた。
材質は、木材からアクリル板にしました。ほんとうは、カーボンファイバーにしたかったですが、それは、次回にしました。
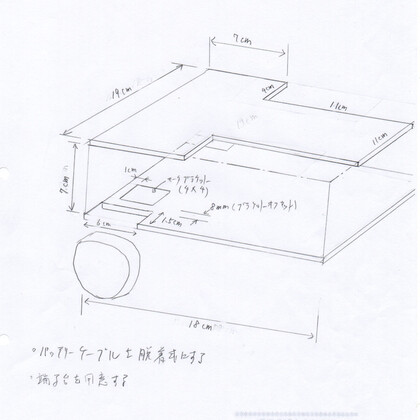
190[mm] x 180[mm] x 3[mm] (幅x長さx厚) のアクリル板2枚で簡単にできます。
1. 全体の図
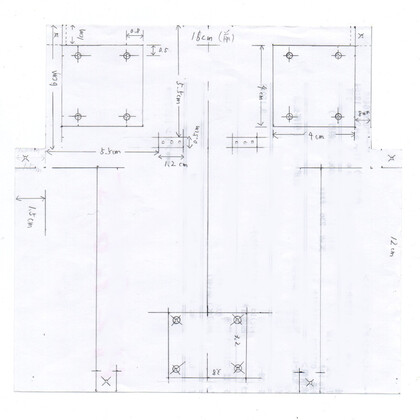
2. 下側シャーシ
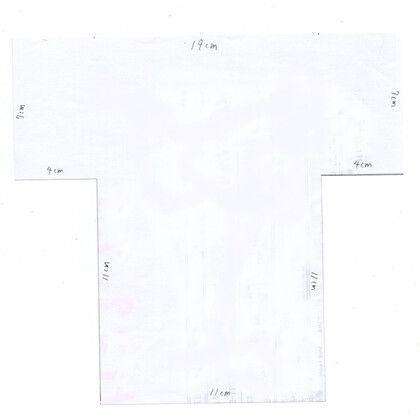
3. 上側シャーシ
4. 組み立て時の注意。
モーターブラケットの取り付けは、両方とも、進行方向にまっすぐなるように、また、下側シャーシの前緑から1[cm] の距離になるように、
取り付けします。
シャーシの前緑から、1[cm] の所に平行線を引いて、それにブラケットを合わせれば、簡単です。
トーアウトにしたければ、ブラケットのモーター取り付け面と、下側シャーシ前緑に金尺(曲尺)を当てて、
金尺(曲尺)の内側と、下側シャーシの前緑の遠いところが、どちらも、数ミリ空くように取り付けます。
とにかく、真っすぐ進むように調整します。
注) ただし、完全に真直ぐにはなりません。左右のモータ制御にばらつきがあるので、曲がったりします。
Rviz で、base_link のズレと、実際のロボットのズレが一致していれば、OK です。
5. foxbot_core3 の odometry 調整をします。
Turtlebot3 の自作 #4 のSLAMの起動方法で、直進と回転を実測とRviz の計測値とが一致するように詰めます。
i) 直進の補正。
実測2M の直線を、実際に走らせて、Rviz の Measure 値との差がなくなる様に、WEHEEL_RADIUS を詰めます。
今回、実際 2M 走行させて、Rviz の Measure で、 2.0554[M] まで詰めました。欲を言えば、2.01[M] までにしたいですが。
ii) 回転の補正。
Rviz で、360度1回転させて、その時の回転の実測との差がなくなるように、BASE_LENGTH を詰めまてみます。
今回、殆ど差が無い所まで詰めました。